ubuntu小知识
发表于|更新于|rm-学习记录
|浏览量:
ubuntu 进入 recovery mode_ubuntu recovery mode_Mr. Sun_的博客-CSDN博客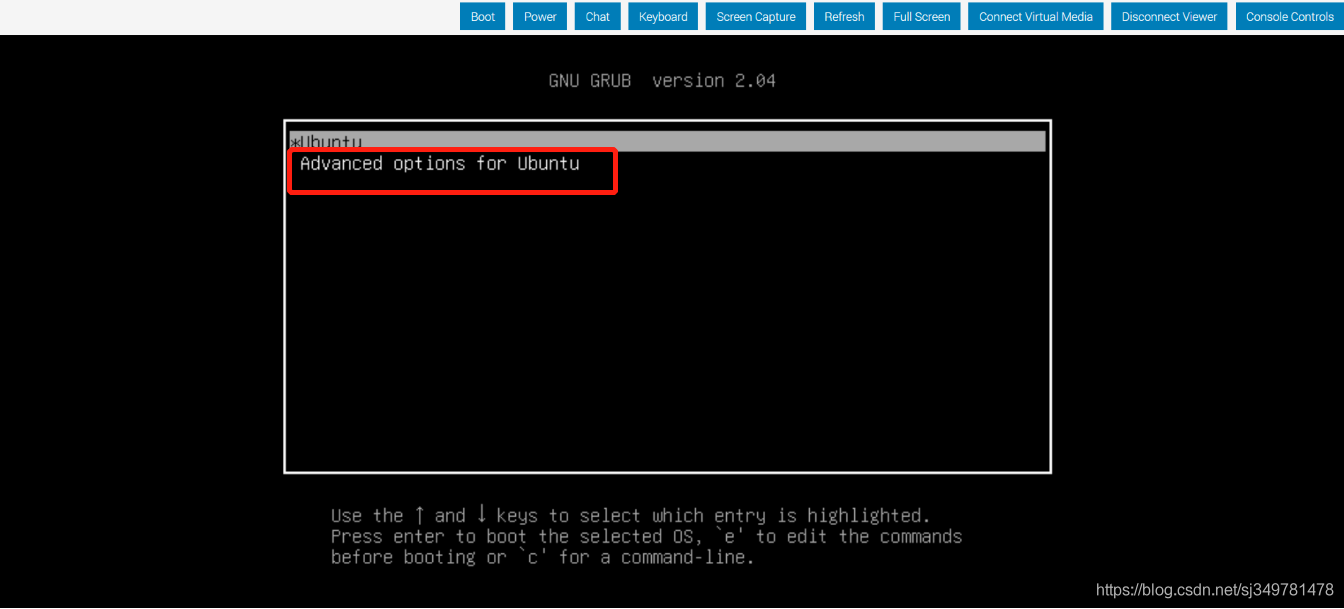
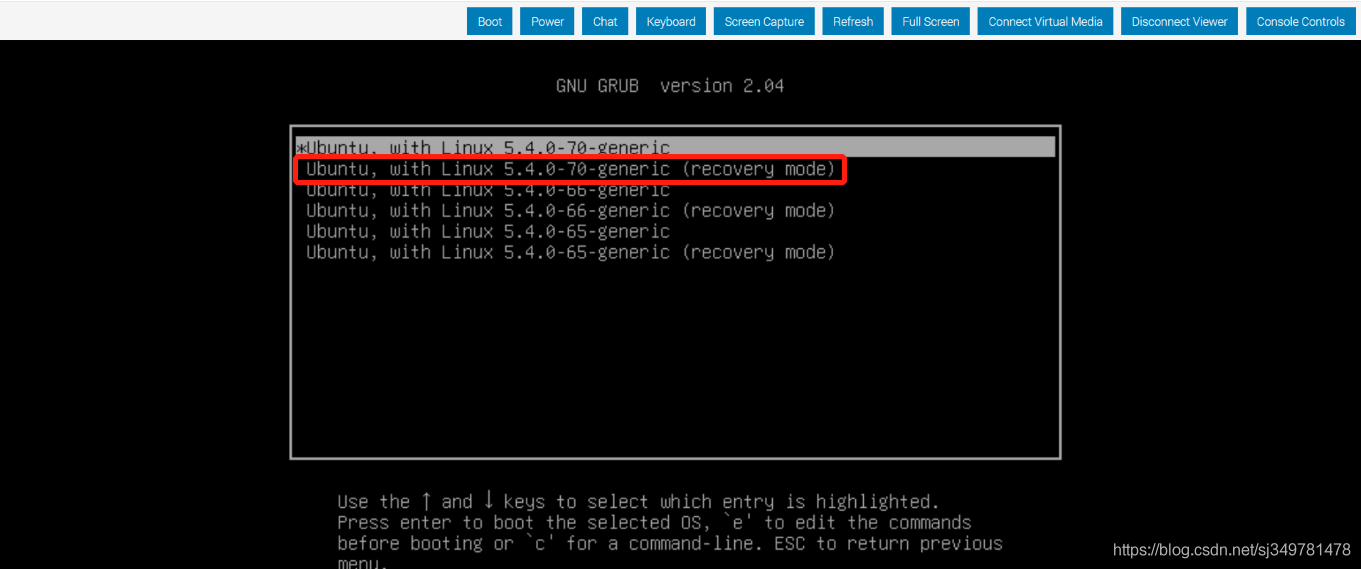 resume: 退出 recovery 模式,然后正常启动;
resume: 退出 recovery 模式,然后正常启动;
clean: 尝试清理垃圾文件,腾出更多的空间;
dpkg: 修复损坏的包;
fsck: 检查所有文件系统;
grub: 更新 grub 的启动载入器;
network: 启动网络;
root: 进入命令行模式;
system-summary: 系统概览,查看电脑的基本信息;
文章作者: Xing
版权声明: 本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Xing!
相关推荐
2025-11-12
感知规划决策
自动驾驶 自动驾驶综述|定位、感知、规划常见算法汇总 简单的将自动驾驶分成感知规划控制 SLAM | 激光SLAM中开源算法对比-CSDN博客 感知: 建图 fast-lio Cartographer SLAM | 激光SLAM中开源算法对比-CSDN博客 定位 amcl 规划: Navigation–导航算法(局部视野导航)–DWA、TAB_majingming123的博客-CSDN博客 这方面的优化主要有两个方向一个是基于图优化 导航 基本上就是nav1或者nav2然后在这个框架下调用算法 全局规划: Dijkstra算法、A算法_dijkstra算法和a算法_Jason.Li_0012的博客-CSDN博客、 自动驾驶 | 路径规划算法Dijkstra与A*_3D视觉工坊的博客-CSDN博客 a*还有迪杰斯特拉 局部规划: teb和dwa 决策 控制: 决策系统负责 定位 定位这块,市面上的主要是基于gps,但是由于有一些道路信号不好,比如峡谷,荒郊野岭。主流的有三种定位方式:激光雷达,相机,激光雷达加相机 激光雷达的缺点是成本高,激光雷达很贵,我们智慧物流小车上面的一个二维...
2025-11-12
nav2
学习资料 动手学ROS2 Nav2中文网 | Nav2 中文网 在上一次gazebo卡死强制退出之后,就无法打开 重启就好了。。。不要随便的ctrlZ 之后又出现了gazebo无法打开的情况 直接卡死 具体原因:是因为model库加载不正确导致的,gazebo软件开启的时候会自动从网络下载模型,然而,从外网下载过程非常的漫长,很难加载成功。 学过ros的对gazebo仿真软件应该都不会陌生,但是有时启动真的很烦人,经常卡在这个地方很长时间,查阅资料 gazebo软件开启的时候会自动从国外官网下载模型,因此这个过程比较漫长,原因是网站在国外,下载不顺畅。有一个加速启动的方法就是断开网络连接启动,但频频断网还是不太方便。 手动杀死gazebo(保证杀死) 1killall gzserver && killall gzclient 按照文章里的把这个文件全部注释了没有用 最后选择断网来解决 有可能是launch文件中的某写模型路径不对 gazebo使用 这个表示坐标点的位置 先标出来初试坐标 1234567mkdir -p ~/nav2_ws/srccd ~/n...
2025-11-12
ros2中的log系统
ROS2官方教程:日志与日志记录器配置_ros2 loglevel-CSDN博客 std::cout、printf 和 RCLCPP_INFO的对比-CSDN博客 官网文档 如何实现节点输出的记录 ROS 机器人技术 - rosbag 详细使用教程! 记录和回放数据 [待校准@8079] — ROS 2 documentation 文档 可以直接输出成yaml文件,也算是一种记录 ROS2 日志管理与可视化 在rqt中可以直接将roslog出来的文件的数据输出成csv格式 而ros自己的 日志和日志记录器配置例程 [待校准@7762] — ROS 2 documentation 文档 这个文件夹下面的log是ros2自己进行日志记录的地方,所有的输出都变成log文件。每次运行都会有输出 以前使用的c++输出到文件当中
2025-11-12
pcl
Introduction — Point Cloud Library 0.0 documentation PCL(Point Cloud Library)学习指南&资料推荐(2023版) 网上一些PCL学习资料-CSDN博客 01-点云滤波Filtering * - 黑马机器人 | PCL-3D点云 PCL点云库学习笔记(文章链接汇总)_Robot_Yue的博客-CSDN博客 点云数据一般是由xyz还有强度信息组成 强度信息是指反射回来的光波的强度,表示物体表面粗糙度,反射率等 点云数据格式转换 从ros中的点云数据转换到pcl中的点云数据 pcl库 主要问题是找不到pcap这个包 所以想把他删掉,然后再重新下载 后面的一堆报错表示pcl貌似版本兼容有问题 提取关键字是 undefined reference to 这里是是找不到调用的函数 最后发现是链接动态链接库的时候链接了错的动态库应该链接pcl_ros而不是PCL yum yum 和 apt 是两种不同的包管理工具,它们分别用于不同的Linux发行版,具体区别如下: Linux 发行版: yum 是用于 ...
2025-11-12
ros
ros1 ros命名空间 由浅到深理解ROS(3)-命名空间 - jason来自星星 - 博客园 ros2 名词解释 abi 是二进制接口 详细讲解 api 是编程的接口 cli 命令行界面(Command Line Interface) tui 终端用户界面(Terminal User Interface) 也就是在cli的基础上添加了点图形化的东西,更好看 colcon 可以理解成ros1中的catkin,编译的工具 oop 面向对象编程 也就是说在写程序前,要先想好些什么类,生成一个什么样的对象,这个对象需要什么功能,有什么作用。把这些需求集中在类中 pop 面向过程编程 需要啥功能写啥函数 基础知识 python ros2中面向过程编程 1234567891011import rclpyfrom rclpy.node import Nodedef main(args=None): rclpy.init(args=args) node=Node("li4") node.get_logger().info("Hello World")...
2025-11-12
10卷积神经网络(初级)
二维卷积神经网络 00:03:44.271 放进卷积层,然后使通道数提升 00:04:36.639 下采样层中通道数是不变的 但是宽高会变 目的减少数据量,降低运算的需求 00:05:59.344 再做一次5x5的卷积 然后2x2的下采样 最后要把三阶向量展开成一维向量 就是挨个排序 00:07:13.014 然后利用全连接层来映射到10个输出 利用各种层,进行维度变换 00:08:22.737 卷积+下采样=特征提取器 图像: rgb图像 栅格图像 00:11:25.291 00:24:15.002 00:25:19.212 取出来一个图形块 对图像块进行卷积 依次移动 输出通道数 00:28:20.851 00:29:22.737 00:29:54.087 00:30:10.046 这个就是单通道卷积的形象表示 00:30:33.601 三通道卷积 00:31:02.697 每一个通道设置一个卷积核 00:32:17.903 最后三维变成1维 00:33:10.285 00:35:20.005 由于kernel 是3x3的所以 h和w减二 ...